01 - Signals, Systems, and Sequences¶
Lecture 01 - 13 September 2021
The first lecture consists mostly of definitions and reminders. These are usually boring and rather cumbersome but are nevertheless needed.
Let’s start with our first definition: signals.
Signals¶
A signal is a MAP from time to some space:
It is possible to restrict the domain and the codomain to \(\mathcal{Z} \subset \mathcal{R}\) so that we have four types of maps:
FROM \ TO |
\(\mathcal{R}\) |
\(\mathcal{Z}\) |
|---|---|---|
\(\mathcal{R}\) |
ANALOG |
NOT USED |
\(\mathcal{Z}\) |
DIGITAL |
DIGITAL |
SYSTEM¶
Similarly, systems are MAPs between signals
FROM \ TO |
ANALOG |
Digital |
|---|---|---|
ANALOG |
Analog System |
Analog to Digital Converter |
DIGITAL |
Digital to Analog converter |
Digital system; numeric |
SEQUENCES¶
Sequences are maps from integer numbers to real or integer numbers:
Two remarkable sequences are the Delta / Impulse sequence and the Step Sequence.
Delta sequence¶
The delta sequency is defined in analogy to the diract delta and the Kronecker delta:
The analogy is straightforward:
Step Sequence¶
Similarly, the step sequence is defined in analogy to the Heaviside theta:
import matplotlib.pyplot as plt
import numpy as np
t = np.arange(-5, 6, 1)
delta = np.zeros(t.shape); delta[ t.shape[0]//2] = 1
heavi = np.heaviside(t, 1)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(15, 5))
ax1.title.set_text('Delta / Impulse Sequence')
ax1.scatter(t, delta, marker='o', label=r"$\delta[n]=\delta_{n,0}$")
ax1.set_xlabel('n'); ax1.set_ylabel('y[n]')
ax1.grid(True); ax1.legend(prop={'size': 14})
ax1.set_xticks(t)
ax1.set_ylim((-1, 2))
ax2.title.set_text('Step Sequence')
ax2.scatter(t, heavi, marker='o', label=r"$U[n]$")
ax2.set_xlabel('n'); ax2.set_ylabel('y[n]')
ax2.grid(True); ax2.legend(prop={'size': 14})
ax2.set_xticks(t)
ax2.set_ylim((-1, 2))
plt.show()
print("Left: Plot of the delta;\nRight: Plot of the step sequence.")
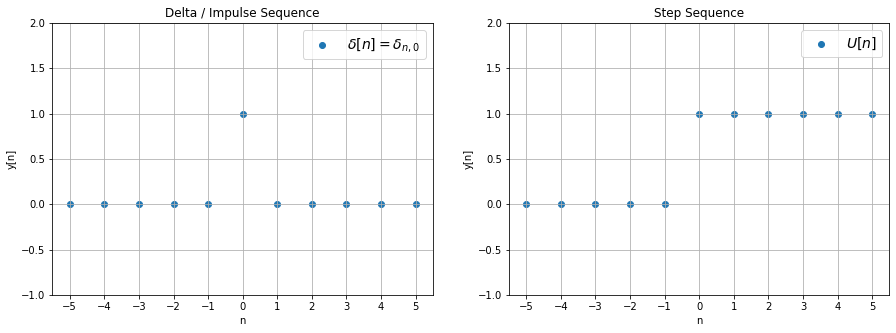
Left: Plot of the delta;
Right: Plot of the step sequence.
A sequence can be delayed or anticipated:
Delayed sequence: \(y[n] = x[n-n_0],\ n_0>0 \in \mathcal{Z}\);
Anticipated sequence: \(y[n] = x[n+n_0],\ n_0>0 \in \mathcal{Z}\).
These two operations are essential as they allow us to write all series as a sum of deltas with proper coefficients:
that is a discrete convolution between a sequence and a delta.
Periodic Sequences¶
A sequence \(x[n]\) is said to be periodic of period \(T\) if and only if (iff) \(x[n-T] = x[n]\ \forall n \in \mathcal{Z}\).
Energy¶
Finally, the energy of a system is defined as
where the modulus was introduced to take care of signals \(\mathcal{Z}\rightarrow \mathcal{C}\).
Linear and Time-Invariant (LTI) Systems¶
As one can immagine, LTI systems are systems that are both linear and time invariant. Let’s consider a system:
Linear Systems¶
A system is linear iff given \(y_1[n]=\mathcal{S}(x_1[n])\) and \(y_2[n]=\mathcal{S}(x_2[n])\) the following relation holds:
for every \(\alpha, \beta \in \mathcal{R}\).
Warning
Saying “a linear system is one for which the superposition principle holds” is a tautology because the superposition itself is defined via linearity.
One remarkable consequence of linearity is:
that is: a linear system is fully characterized by its impulse response \(h[n]=\mathcal{S}(\delta [n])\).
Time-Invariant Systems¶
A system is said to be time invariant iff
that is: “to the same inputs correspond the same outputs without regard on when the input was sent”.