03 - The Z-Transform¶
Lecture 03 - 20 September 2021
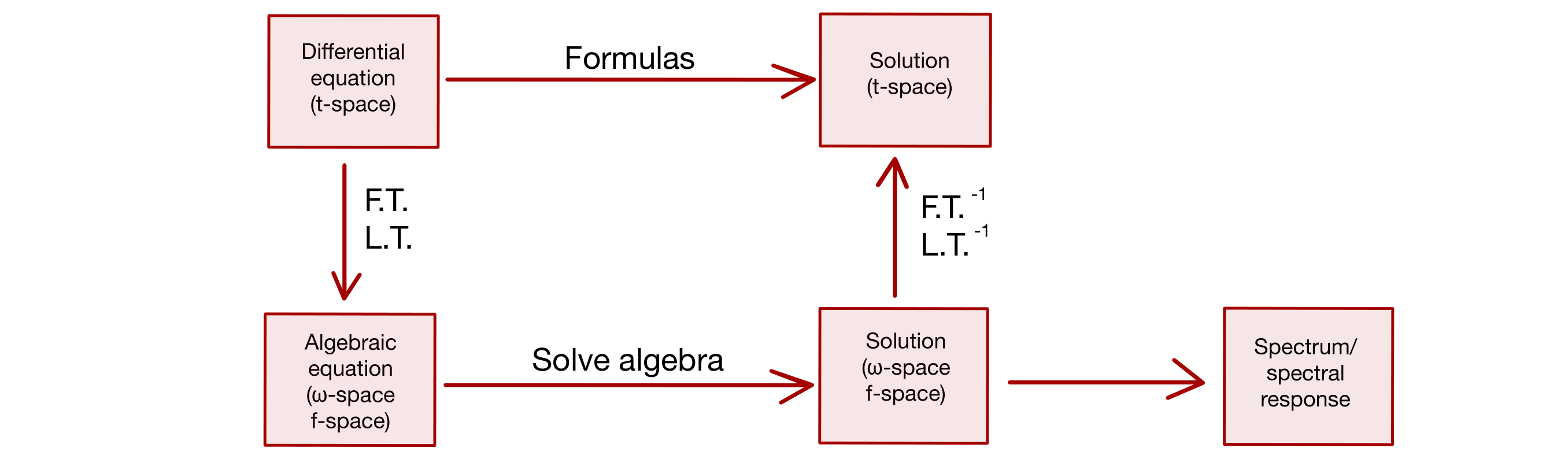
Equipped with the definitions and lemmas found in the last lecture it is possible to start talking about the z-transform. But first, it is necessary to draw some parallelisms with the solutions of a differential equation:
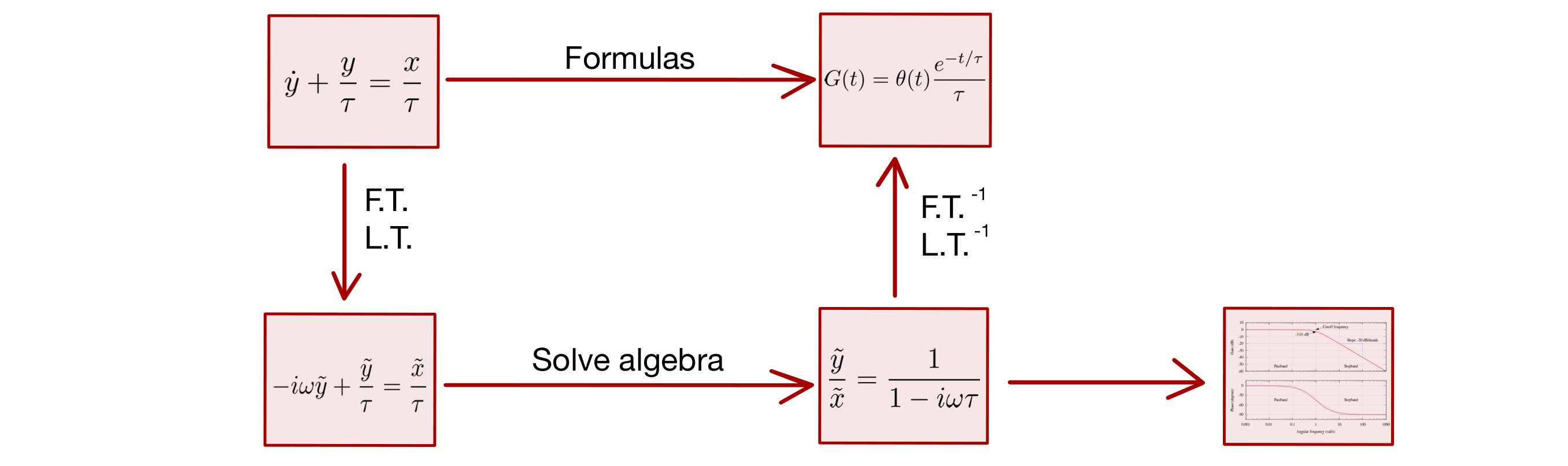
For example, with a low pass filter, the procedure becomes:
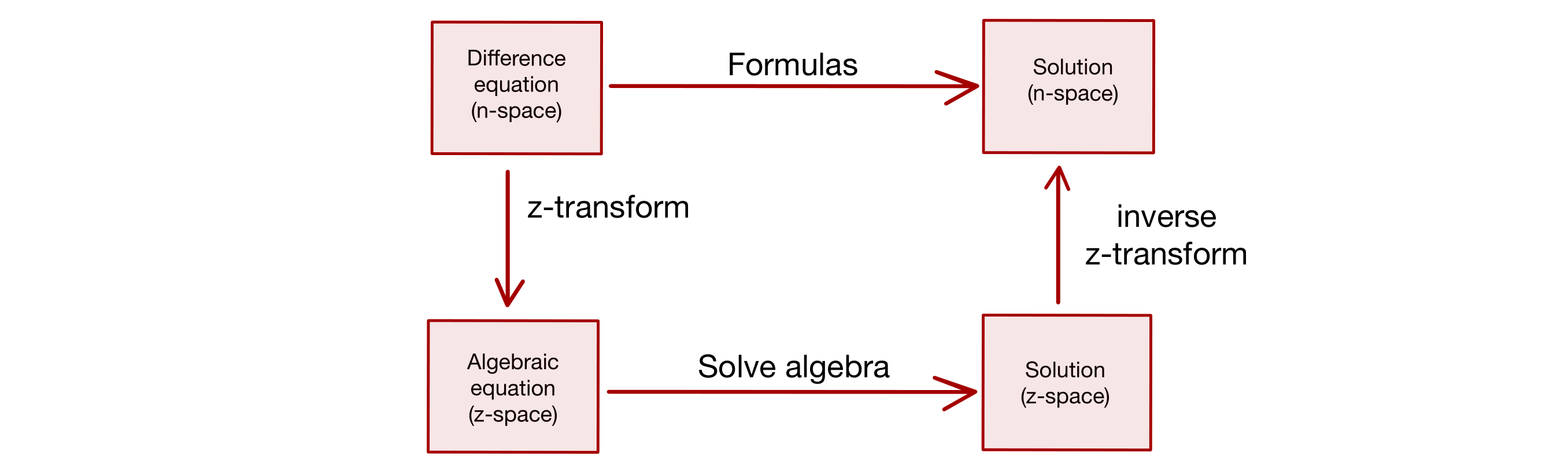
Similarly, a difference equation can be solved via an appropriate transform, the z-transform
The z-transform¶
Given a sequence \(x[n]\) we write the z-transform as
In the previous definition, R.O.C stands for Region Of Convergence, the region of the complex plane where the series converges to a finite value.
Some remarkable examples of z-transforms are:
Examples:¶
The delta¶
Step sequence¶
Step sequence (second case)¶
It is possible to notice that two different functions led to the same z-transform but different R.O.C. A warning is due:
Warning
The z-transform is NOT sufficient to characterize a system in the z domain. The R.O.C. is part of the system too!
Properties of the z-transform¶
Let \(X[z] = Z(x[n])\).
Time shift¶
Linearity¶
Convolution¶
There are two different proofs of this relation, one that exploits linearity and the time shift while the other is a more standard one that does not require any lemma. I’ll report both of them for completeness:
Standard proof¶
Proof via linearity¶
Cascade of two systems¶
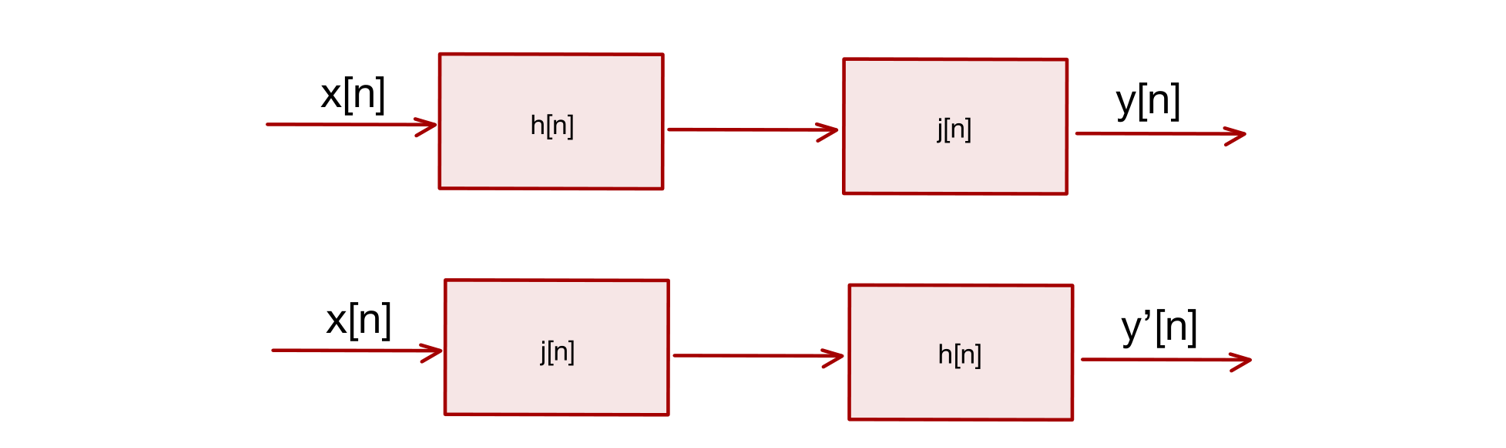
If the two systems are L.T.I. the two cascade are equivalent: \(y[n]=y'[n]\). The proof lies in the equality of the z-transform and the properties of the convolution. More than that, the two systems \(y[n]\) and \(y'[n]\) have the same R.O.C:
In the last properties, the notion of inverse z-transform was suggested. To give a formal definition of inverse z-transform some lemmas are needed.
Lemmas for inverse z-transform¶
Close path integral¶
The close path integral around (um) a single pole \(z_0\) depends only on the order of the pole:
proof
Take a circle of radius \(r\) around \(z_0\) such that \(z=z_0+re^{i\phi}\). Then:
I like to call this lemma the “hidden logarithm lemma” because it reminds me of the integral \(\int x^n dx\). For every value of \(n\) the integral \(\int x^n dx\) remains a rational function, except when \(n=-1\). Similarly, when \(n\neq -1\) the function is an analytic function, which implies zero circuitation, while for \(n=-1\) a first-order pole is introduced.
Residual theorem¶
proof
Let’s consider a function \(H(z)=G(z)(z-z_0)^n\) which has NO POLES (\(\implies\) it is analytic). By writing its Laurent series one obtains:
By computing the integral using the previous lemma:
Inversion of the z-transform¶
If \(X(z)=Z(x[n])\) then \(x[n]=\frac{1}{2\pi i} \oint_{\Gamma\text{ um }z_0} X(z) z^{n-1} dz\)
proof
where the second equality assumes the R.O.C. allows swapping the summation and the integral.